(平成26年度~平成30年度)
SIP(戦略的イノベーション創造プログラム) インフラ維持管理・更新・マネジメント技術/ 維持管理ロボット・災害対応ロボットの開発(平成26年度~平成30年度)報告書から抜粋 当財団は、国立大学法人東北大学、株式会社リコー,株式会社千代田コンサルタント,とともに委託を受けて本研究開発を実施した。
本プロジェクトは,SIP(戦略的イノベーション創造プログラム)において橋梁の打音検査ならびに近接目視を支援・代替する飛行ロボットシステムの研究開発を目的とした事業である。
具体的には,下記の6つの項目を実施した.
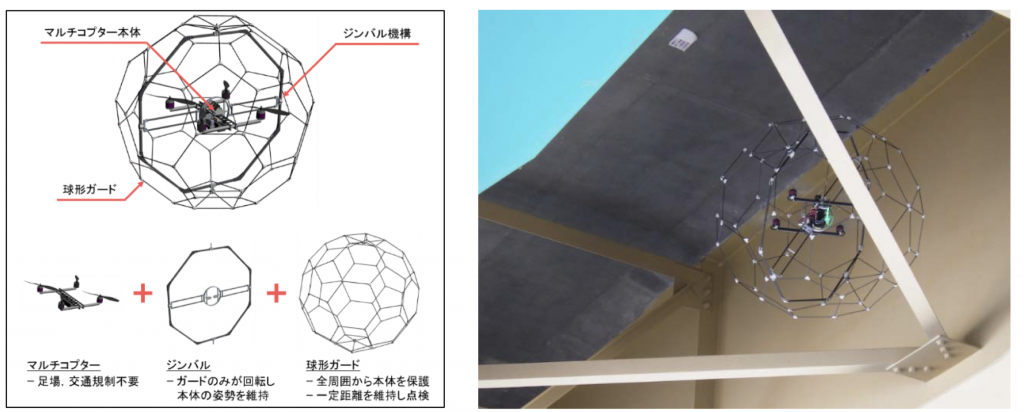
実施項目1「球殻等を有し構造物に接触したまま飛行できるロボットの研究開発」
橋桁等が入り組んだ狭あい空間を,橋梁ならびにロボット自身を傷つけることなく安全安定に 飛行しながら,橋梁表面の接写撮影ができる飛行体(球殻ヘリ)を開発した.実験室や実橋で球殻 ヘリの試験等を実施し,最終試作機のスペックは,『搬送能力 700g』『連続飛行時間 8 分』である ことを確認した.連続飛行時間は目標の 10 分を達成しなかったが,搬送能力に関しては目標の 300g の 2 倍以上を達成した.
実施項目2「飛行ロボットに搭載可能な小型軽量打音装置の研究開発」
小型軽量でプロペラノイズに頑健な打音装置と,それを搭載して橋梁の表面を安全かつ簡便に打 音点検可能な分割球殻型の飛行ロボットを開発した.コンクリート試験体を用いて数値目標である 打音装置の重量 150g 以下,うき検知率 80%以上,誤検知率 20%以下を確認した.また,打音装置 を搭載した分割球殻ヘリを利用して,実橋梁のコンクリート橋脚を対象とした実証試験を行い,飛 行しながら打音可能なことを確認した.
実施項目3「飛行ロボットに搭載可能な小型軽量カメラモジュールの研究開発」
球殻ヘリによる飛行撮影をさまたげない小型軽量で,微細なひび割れが認識可能な解像度,点 検対象の展開画像の合成を実現させるための画角,SD カードへの書き込みフレームレート等を満 足する近接点検用のカメラおよび照明モジュールを開発した.実橋梁において性能実証する実験を おこない所望の目標性能を達成した.
実施項目4「吸着機構等を有し構造物付近で通信を中継できる飛行ロボットの研究開発」
操縦者の見通し外にいる球殻ヘリの通信を中継するために,通信中継器を適切な位置に運搬で きる飛行ロボットを開発した.開発した飛行ロボットは吸着位置決め機構を搭載しており,磁石を 用いて橋梁の桁などの磁性体へ吸着可能とした.吸着した後はプロペラを停止できるため,プロペ ラよるホバリングと比較して電力消費を実測値で 97%減に抑えられ長時間の稼働が可能となった. これにより,数値目標の『連続稼働時間 60 分以上(吸着機構,無線中継器搭載時)』を達成した.
実施項目5「点検結果の一覧表示と調書作成支援技術の研究開発」
球殻ヘリに搭載したカメラで撮影した近接画像群を入力とした展開画像ブラウザ,損傷トレー ス支援・計測機能,点検調書作成支援の各機能を統合し,画像による点検から調書出力までの一連 の作業が可能な点検/調書作成支援アプリケーションソフトを開発した.実橋梁での実証実験にお いて,従来の手法と同等の品質で,国交省の点検要領に従った点検調書様式の出力が可能となり, 外業も含めた点検プロセスの効率化を図ることができた.
実施項目6「実用化に向けた課題抽出のための要素試験・実証試験」
風洞や橋梁モックアップを利用して,球殻ヘリの風に対する飛行特性(耐風性能や VSR が発生す る条件など),球殻の耐衝撃性能,撮影と打音装置の評価を行った.球殻ヘリの飛行中のトラブルに 対処する方法を検証し,実橋梁で実証実験を安全に行うためのルールをまとめた安全・運用マニュ アルを作成した.各種実橋梁(鋼鈑桁橋,鋼トラス橋,PC箱桁橋など)にて実証実験を行い,狭 隘部,暗所部,大断面,特殊橋梁での現場適用性を確認した.安全・運用マニュアルに従い安全に 実証実験を実施した.橋梁管理者からは,『積極的に使用したい』,『特殊橋梁などで利用したい』な ど高い評価を得た.
詳細については、以下の参考文献を参照されたい
橋梁の打音検査ならびに近接目視を代替する飛行ロボットシステムの 研究開発👈